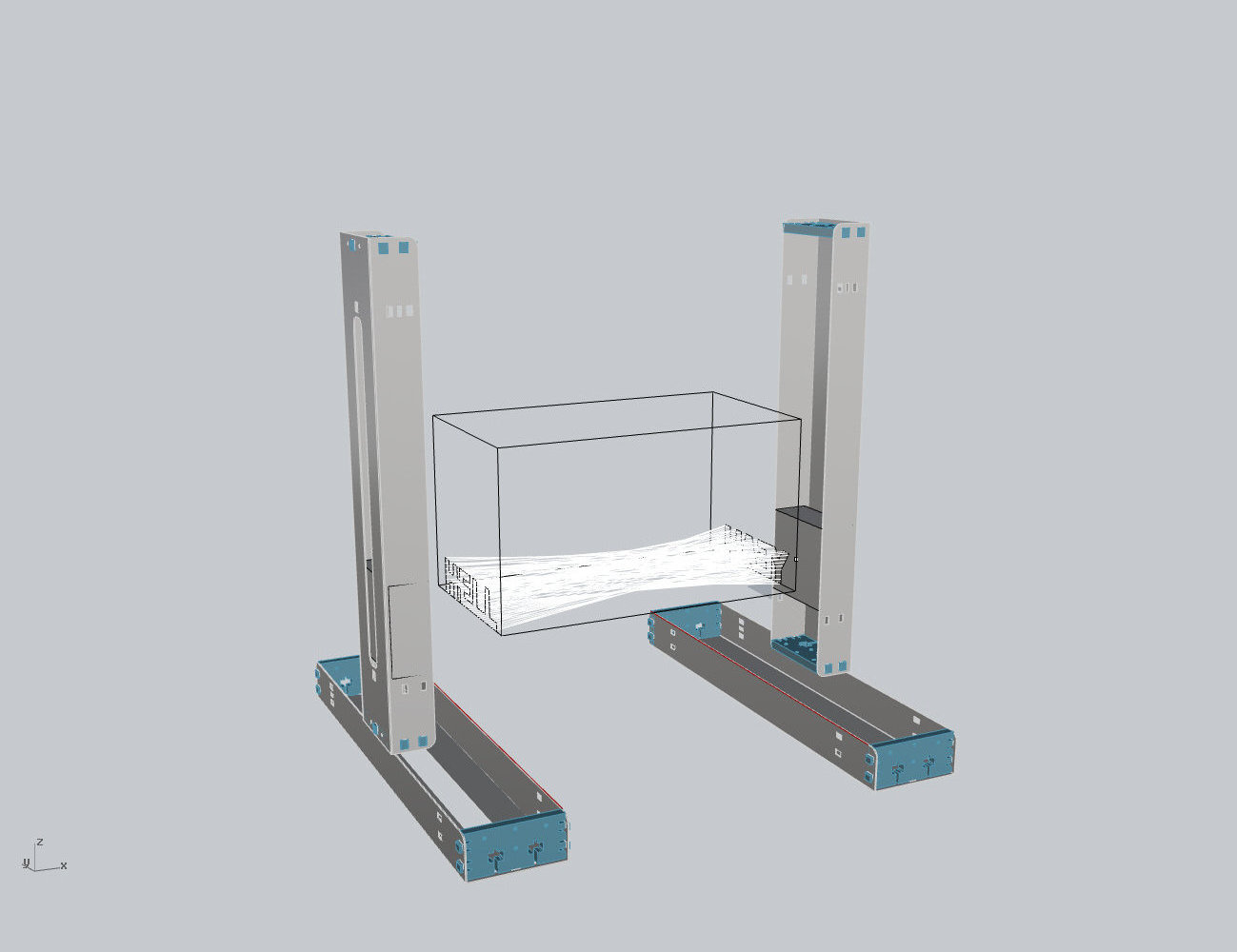
These reconfigurable stages represent one axis of motion each, which can be combined for form new machines.
These modular stages allow users to explore different kinematic models easily. Different heads can be mounted to them, and they run on the pyGestalt virtual machine network so that they can easily take input from a variety of different software interfaces. The files (version 1) and bill of materials (version 1) are available. (See below for version 2.)

The stages have hole mounting patterns premade to allow for rapid attachment in different configurations.
Here we configured the stages to be a 4-axis hot wire cutter. In this short video, the wire cutter is cutting a Mark Drela airfoil.
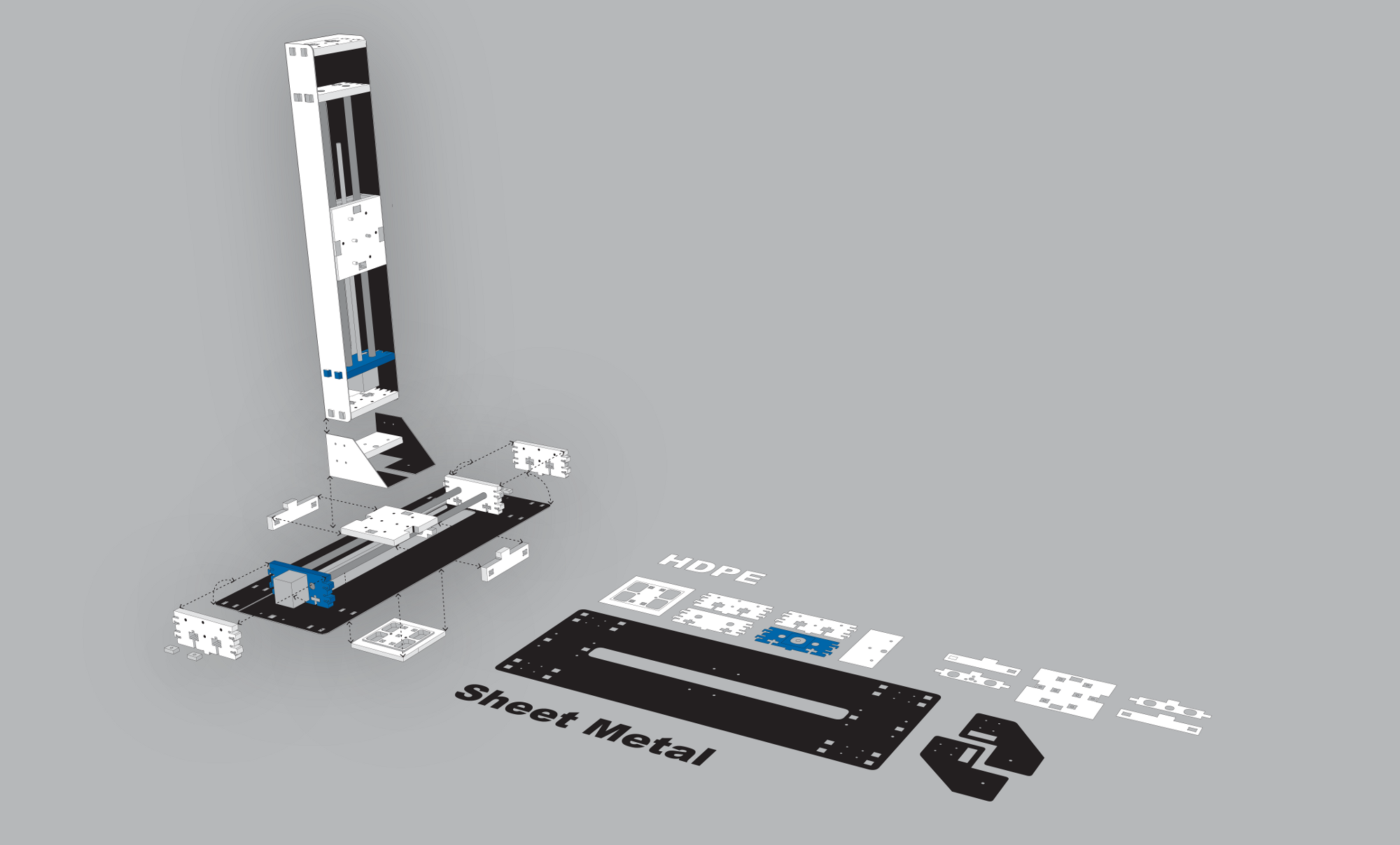 The breakdown of these stages, you can download files here.
The breakdown of these stages, you can download files here.
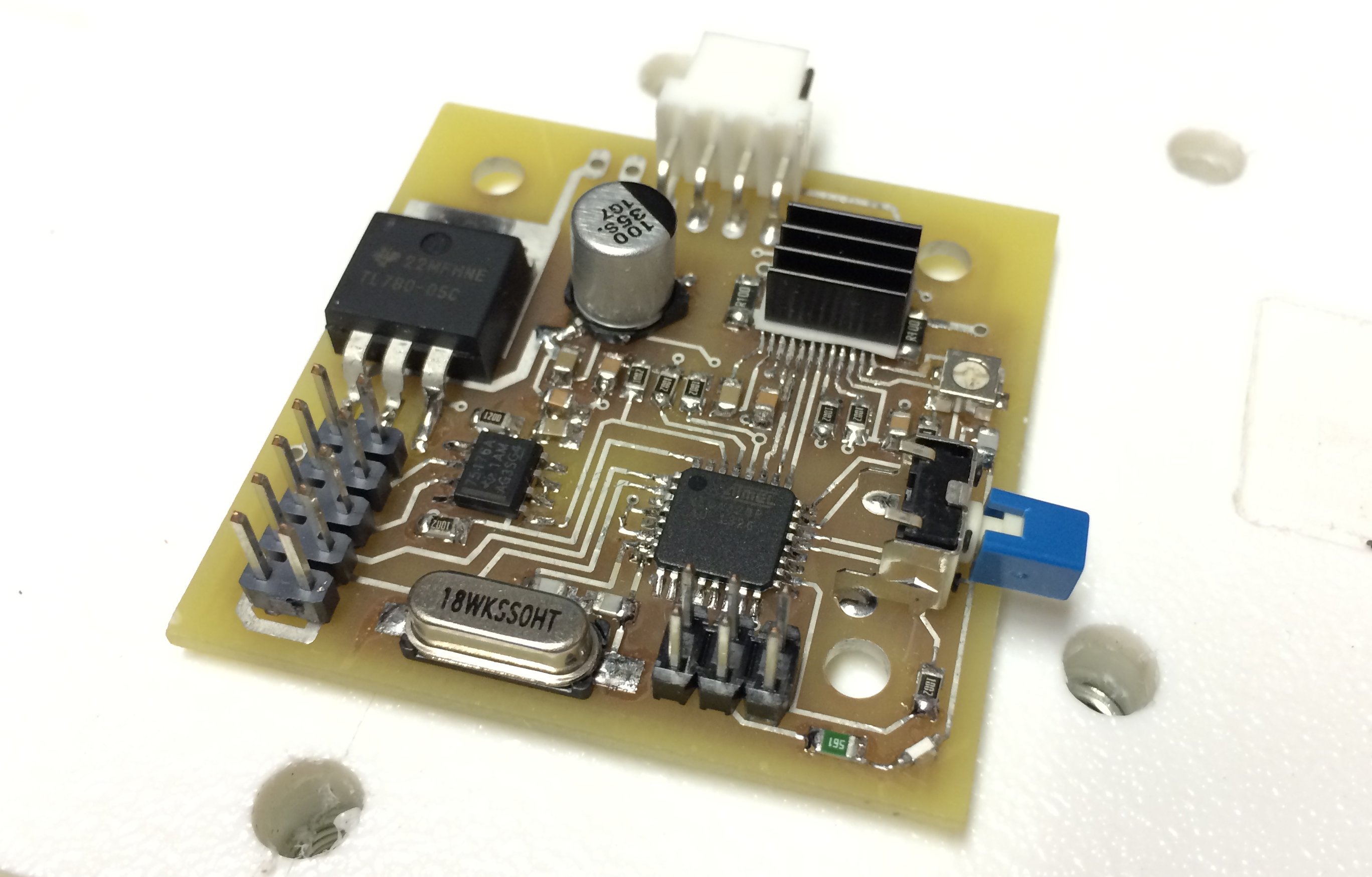
This board is a pyGestalt node with an onboard stepper motor driver to control each axis. You can find the schematics, board, code, and BOM here, and the gestalt library here.
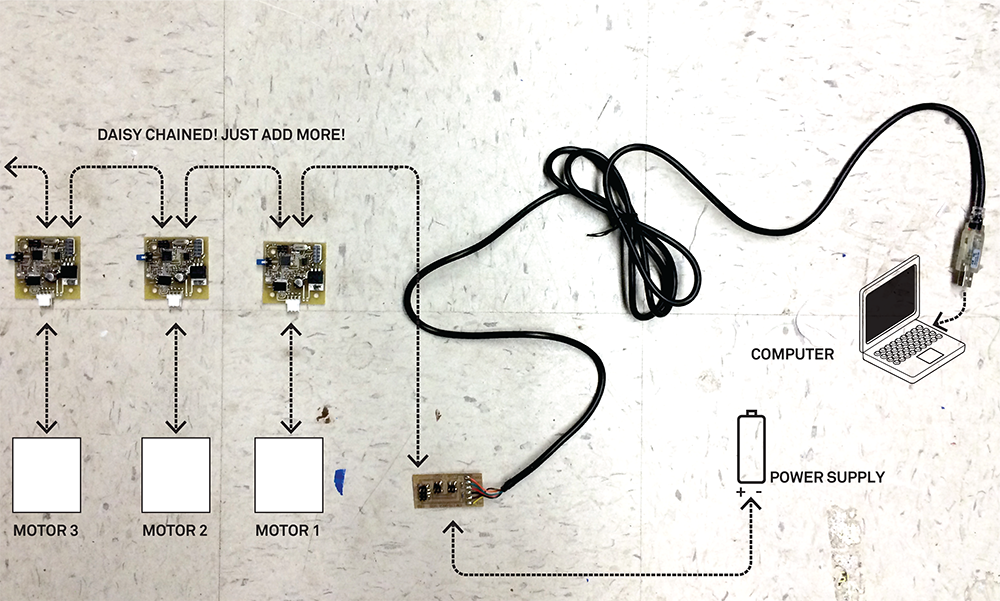
Each node will represent its own axis, identified in your virtual machine. You can see an example virtual machine here, or check out the pygestalt github. You can build your own software interface to talk to the virtual machine, for example from a web browser, or perhaps streaming coordinates from a spreadsheet.
For the hot wire cutter, we exported machine coordinates from a virtual machine representation and imported them into a hot wire virtual machine. The code for that is in the examples section of the pygestalt github. To demonstrate its full 4-axis capability we cut this very functional shape that says “HELL” on one side and “YEAH” on the other:


This work was started in collaboration with the MISIS university in Moscow and James Coleman, Ben Peters, Matt Hirsch, Ilan Moyer, and Nadya Peek in October 2013.
last updated by Nadya Peek March 2014